










- Department Civil Enginnering
- Environmental Studies Course
- Disaster Reduction Studies Course
- Environmental and Disaster Reduction Design Course
- Department of Mechanical Engineering
- Mechanical Engineering Course
- Intelligent Mechanical Engineering Course
- Department of Chemistry and Biomolecular Science
- Materials Chemistry Course
- Biomolecular Science Course
- Department of Electrical, Electronic and Computer Engineering
- Electrical and Electronic Course
- Information Course
- Applied Physics Course


Home > Department of Civil Engineering > Intelligent Mechanical Engineering Course > Associate Professor
Associate Professor
| ITO Satoshi |  |
| Title | Professor |
|---|---|
| Department | Department of Mechanical Engineering |
| Course | Intelligent Mechanical Engineering Course |
Research fields
Human motions achieve their goals using a variety of motion patterns even in the variable purposes or environmental conditions. What is a principle to produce such flexible motion patterns? It will require the functions like learning or adaptation as well as the motion control mechanism. Aiming at realizing machines performing intelligent behaviors like humans, I am tackling the following research themes:
- Motion measurement and its analysis
Human motions are measured to clarify some of their features in order to derive some hopeful ideas on the motor generation.
(Hand motion estimation from the EMG signals, Motion measurement of human upright standings, motor leanings and visual perception)
- Modeling the biological behaviors
Spatio-temporal patterns generation of biological motions are described as the differential equation systems to give a mathematical explanation of their adaptive phenomena.
- Control systems' analysis
A control method for the specific motion system is proposed and its behaviors, stabilities, and physical meanings are analyzed.
(Relative phase control for coupled oscillator systems, hand grasp considering the internal force)
- Robot control and its applications
Robot systems are developed to confirm the theoretical analysis, or for wholly application in the actual human society.
(biped robot, skateboard robot)
 |
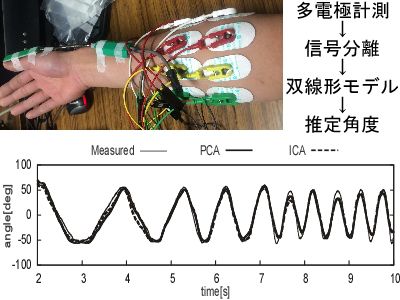 |
| Slope-descending walk of biped robot | Hand motion estimation from EMG signals |
Research Keywords
human informatics, interigent robotics, biocybenernetics
Details page




GIFU UNIVERSITY FACULTY OF ENGINEERING and GRADUATE SCHOOL OF ENGINEERING
1-1 Yanagido, Gifu City 501-1193, JAPAN Phone; +81-(0)58-230-1111
Copyright © 2009-2012 Gifu University Faculty of Engineering and Graduate School of Engineering.