
伊藤 聡(イトウ サトシ)
| ITO Satoshi |  |
| 職名 |
|
||
|---|---|---|---|
| 学科 |
|
||
| コース |
|
||
研究概要
ヒトの運動では、様々な目的や環境に上手く対応し、多様な運動パターンを使ってその目標を達成しています。状況に応じた運動パターンは、どのように生まれてくるのでしょうか。それには運動の制御と学習・適応といった機能が必要です。ヒトのような知的な動きをする機械をめざし、以下のような研究を行っています。
- 運動の計測と解析
ヒトの運動を計測しその特徴を解明することで運動生成原理のヒントをつかむことを目指します。
・筋電信号からの手動作推定、ヒトの平衡制御実験、運動学習と視覚認識変化
- 運動制御のモデル化
生体運動の「適応」を主に、運動の時空間パターン形成を微分方程式系として記述し、現象の数理的説明を試みます。
・ヒトの腕のリーチング運動の学習モデル、四足歩行のパターン生成と適応モデル
- 制御系の解析
目的とする運動を実現する制御方法を考案し、その振る舞いや安定性の解析、物理的意味の解明を目的とします。
・結合振動子系の自律分散位相差制御、内力を最小とする物体把持
- ロボット制御とその応用
ロボットを用い、理論の実験的検証や応用を目指した開発を行います。
・二足ロボット、スケートボードロボット
 |
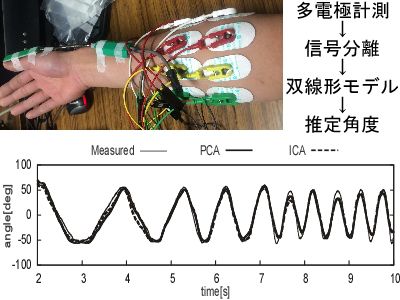 |
| 図1 二足ロボットの斜面歩行 | 図2 筋電信号の手動作推定 |
研究キーワード
人間情報学、知能ロボット、バイオサイバネティクス
詳細ページ