










- Department Civil Enginnering
- Environmental Studies Course
- Disaster Reduction Studies Course
- Environmental and Disaster Reduction Design Course
- Department of Mechanical Engineering
- Mechanical Engineering Course
- Intelligent Mechanical Engineering Course
- Department of Chemistry and Biomolecular Science
- Materials Chemistry Course
- Biomolecular Science Course
- Department of Electrical, Electronic and Computer Engineering
- Electrical and Electronic Course
- Information Course
- Applied Physics Course


Professor
| YAMADA Hironao |  |
| Title | Professor |
|---|---|
| Department | Department of Mechanical Engineering |
| Course | Intelligent Mechanical Engineering Course |
Research fields
By a general point of view, our research activities could be classified in three main themes, namely:
(1)Control Theory / Mechatronics / Robotics
(2)Human Support System
(3)Virtual Realty Applications
As for the (1) themes, we consult on the researches of "Vision Recognition System using Fovea Lens" and "Energy-saving hydraulic actuator system", and so on. About the theme of (2), we conduct "Development of Wheelchair Simulator" and "Study on Arm Type Power Assist System". Finally, theme (3) includes "Development of a Telerobotics System for Construction Robot Using Virtual Reality", "Study on operational evaluation of construction machine using virtual reality ".
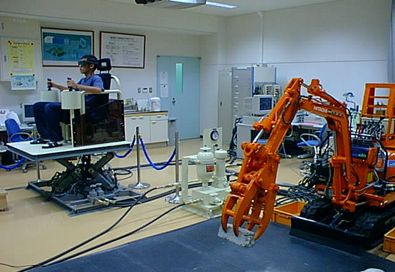
The Telerobotics System for Construction Robot system consists of a servo-controlled construction robot, two joysticks for operation of the robot from a remote place and a 3 degrees of freedom motion base. The operator of the robot is sitting on the motion base and is able to control bilaterally from a remote place. The role of the motion base is to simulate the realistic motion of the construction robot. We proposed, a new method of master-slave control in order to control hydraulic actuators which were used for actuating the construction robot. The availability of the proposed method was examined by experiment and thus the validity of the method was confirmed.
 |
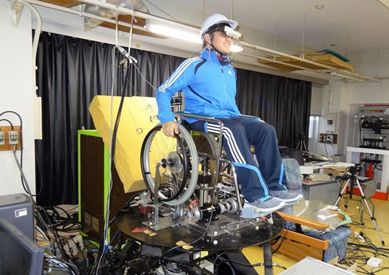 |
| Telerobotics System for Construction Robot Using Virtual Reality | Development of Wheelchair Simulator |
Research Keywords
Mechatronics, Robotics, Human Support System, Virtual Realty
Details page




GIFU UNIVERSITY FACULTY OF ENGINEERING and GRADUATE SCHOOL OF ENGINEERING
1-1 Yanagido, Gifu City 501-1193, JAPAN Phone; +81-(0)58-230-1111