
山田 宏尚(ヤマダ ヒロナオ)
| YAMADA Hironao |  |
| 職名 |
|
||
|---|---|---|---|
| 学科 |
|
||
| コース |
|
||
研究概要
当研究室で取り組んでいる研究分野は大きく分けて、以下の3分野があります。
(1)制御工学・メカトロニクス(ロボット工学を含む)、
(2)人間支援システム、
(3)バーチャルリアリティ
まず、(1)の分野では人間の視覚特性を模擬した中心窩レンズを用いた視覚認識システムの研究や、省エネ型油圧アクチュエータの制御システムの開発、動特性シミュレーションによる最適化に関する研究などを行っています。また(2)においては、バリアフリー評価や車椅子訓練のための車椅子シミュレータの研究、作業支援用のパワーアシスト装置の開発、起立動作特性に基づく起立補助装置の開発などを行っています。さらに(3)では、災害現場などの復旧工事に役立つ遠隔操作臨場感提示建設ロボットの開発や、バーチャルリアリティを用いた建設機械の操作性評価手法に関する研究を行っています。
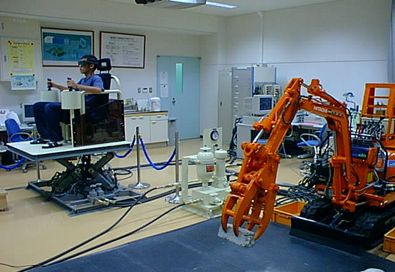
上記のうち、遠隔操作臨場感提示建設ロボットでは、2つの操作レバーと3自由度揺動装置を持つ操作プラットフォームより、離れたところにある建設ロボットをバイラテラル制御で操作するための新しい手法などを開発し、実験により検証を行っています。
 |
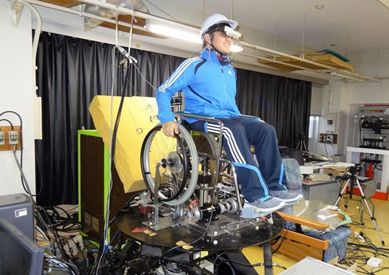 |
| 災害現場で役立つ遠隔操作臨場感提示建設ロボット | 車椅子訓練用シミュレータの開発 |
研究キーワード
メカトロニクス、ロボティクス、人間支援、バーチャル・リアリティ
詳細ページ